


Experimental device
Given the need for detailed experimental methodology and architectural insights, this paper meticulously describes the experimental procedures to ensure clarity and reproducibility.
Experimental setup: The CSI dimension in our study is 1*3*30. This configuration consists of one transmit antenna and three receive antennas. The experimental hardware includes two Lenovo desktop computers with Intel Core i5800 CPUs. The sending computer is equipped with one antenna, and the receiving computer is equipped with three antennas. A wireless transmission and reception system includes a monitor point (MP) for signal reception and an access point (AP) for signal transmission. The spatial arrangement of these antennas is shown in Figure 2.
Building software and models: The model is developed in MATLAB, a platform known for its robust capabilities in algorithm development and simulation. To ensure a consistent operating environment, both computers utilize Ubuntu 14.04 LTS. These systems with Intel 5300 network cards will have the correct kernel and driver configuration prior to installing the CSI Toolbox (see below for more information).twenty three. This toolbox helps you process CSI and provides a comprehensive suite of features for analyzing and interpreting wireless signal characteristics. This facilitates the extraction and manipulation of CSI data essential to our research. Additionally, the self-organizing map neural network employed in our study is configured with a default output dimension of 100 to optimize performance for specific applications.
Data collection environment and process: Data were collected in two different environments to assess the generality and effectiveness of the model under different conditions. The first environment was a 6.5 m x 8 m laboratory filled with test benches, chairs, and computers, with significant obstructions and strong multipath interference. The second was a spacious 9.5 m x 11 m conference room with minimal multipath interference. For each setting, 200 datasets representing both occupied and unoccupied states were carefully collected, and each session lasted 180 seconds and included the transmission of 100 channel state information packets per second. Data were collected at different speeds and by different personnel with a training to test set ratio of 8:2.
Dataset and validation: As there is no standardized dataset for detecting human presence, our study utilizes a unique dataset for model validation. This dataset covers his two different scenarios and facilitates a thorough evaluation.
Evaluation metrics: To comprehensively evaluate the performance of the experiment, we utilized true positive rate (TPR) and false positive rate (FPR) as the main metrics. The true positive rate refers to the probability of successfully detecting the presence of a person in the test set if the person is actually present. Conversely, the false positive rate indicates the probability of incorrectly recognizing the presence of a person when in fact no one is present.

Experimental environment planning.
Base line
To benchmark our model, this dataset is also utilized to replicate the methodology outlined in Ref. FreeSense, Wi-alarm, and HAR.
free sense17:FreeSense identifies human movement by detecting the phase difference between the amplitude waveforms of multiple antennas.
Wi alarm18: Wi-alarm uses raw channel state information for human movement monitoring and uses SVM for detection.
haartwenty one: In this study, the authors used CNN to perform edge detection on CSI data to enhance WiFi-based human activity recognition.
Performance evaluation
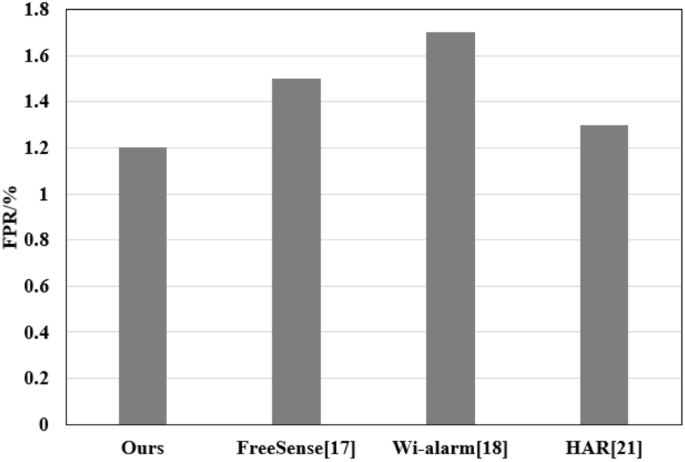
Comprehensive performance evaluation FPR.

Total performance evaluation TPR.
Comprehensive performance evaluation: We compared our method with FreeSense to effectively evaluate the overall performance.17Wi alarm18,HARtwenty one. As shown in Figures 1 and 2. As shown in Figures 3 and 4, this method achieved the lowest FPR values across different data types, with an average of approximately 1.2.\(\%\)it has a high TPR of 99.5.\(\%\). This indicates that fewer false alarms are triggered by this method when detecting human presence.
Performance analysis in various environments: The versatility of our approach was further demonstrated through a series of experiments conducted in different environments and postures, as shown in Figure 5. These figures show the influence of environmental conditions on performance indicators. In both conference room and laboratory settings, the average TPR for detecting human presence was recorded at 98.8.\(\%\) and 98.4\(\%\)the average FPR was 1.3.\(\%\) and 1.5\(\%\). This shows that there are small differences in the accuracy of human perception technology in different test environments. Multipath effects were reduced in more spacious conference rooms. Conversely, the small size and large number of scattered objects in the laboratory resulted in stronger multipath interference, leading to poor signal quality. Nevertheless, overall his TPR was consistently above 96.\(\%\). Notably, his SNR in the conference room is approximately 19.7 dB, compared to 17.4 dB in the laboratory environment, highlighting the resilience of the method under different conditions.
Performance analysis across different body types: You can now recognize individuals of different genders, weights, and heights. The experimental results showed no significant changes depending on the subject’s posture, highlighting the high versatility of this method. As shown in Figure 5.

FPR under different environments and personnel postures.

TPR at different travel speeds.

FPR at different travel speeds.
Performance at various movement speeds: The study also evaluated human motion perception at different speeds, including slow walking, normal walking, fast walking, and sprinting. The experimental results were compared side-by-side with two typical methods, as shown in Figures 3 and 4. The results showed that this method maintains stable TPR and FPR across different movement speeds. However, when the participant moved at a slower speed, his TPR significantly decreased while the other three methods significantly increased his FPR. This result can be attributed to the fact that the interference characteristics of the wireless signal are reduced during the slow sampling period, and the human body has less influence on the wireless signal. Nevertheless, the self-organizing competitive neural network used in this method had a rich feature set and maintained stable His TPR and FPR, proving the robust reliability of the method.
Performance under changing environments: We conducted targeted experiments to investigate the robustness of our model to the effects of environmental changes, particularly the rearrangement of furniture in a room. We varied the arrangement of chairs and tables in both laboratory and conference room settings to assess the impact on model performance. The results revealed that rearranging the furniture actually affected the model’s performance. After adjustment, TPR decreased by approximately 1.8% in the laboratory environment and by approximately 2.1% in the conference room. These findings suggest that while the model exhibits considerable robustness, it is somewhat affected by changes in furniture layout. Importantly, these tests were conducted without retraining the model, highlighting the model’s adaptability to changing environments. However, be aware of how furniture layout affects performance. Future research aims to investigate this issue more thoroughly, with the goal of developing more stable and efficient models for detecting human presence. Through optimization and tuning, we aim to improve detection accuracy and robustness in various environments and increase applicability in smart home, medical monitoring, and other scenarios.